T.R.-C.ABS・M.A.-C.ABS
- 1995.09
| ABS作動 |
| |
左右のレバーから入力してブレーキング中の場合 |
| |
| ・ |
それぞれの車輪に取り付けられた車輪速度センサーは、その回転信号を常にECUに送っている |
| ・ |
急ブレーキや路面変化によって、ブレーキのかけすぎの状態となった場合、車輪はロックする方向に向かう |
|
| |
| |
| (1) |
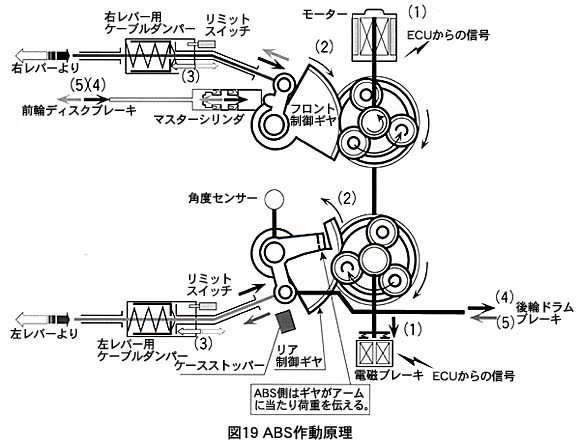
ECUは、それぞれの車輪のスリップ、加減速の状態などから、どの程度制動力を緩めれば良いかを判断し、アクチュエータに適切なモーター電流と電磁ブレーキの作動信号を送る |
| (2) |
アクチュエータは、モーターの回転力によって各制御ギアを“連動”の場合とは逆方向に回転させる。この場合、“連動”作動時とは異なり、後輪用の制御軸も回転力を受ける |
| (3) |
制動力を緩めるためには、ブレーキレバーを保持していてもブレーキレバーとアクチュエータ間のケーブルインナー長を増加させる必要があるため、ケーブルダンパーのスプリングがたわみ(ケーブルアウターが縮小)、ケーブルインナーを擬似的に伸ばすことでストロークを増加させる |
| (4) |
以上の結果、制動力を緩めることが可能となり、ブレーキのかけすぎによる車輪ロックを回避することが可能となる |
| (5) |
車輪の回転速度が充分に回復したと判断されれば、モーターの回転力を減少させ、再び制動力を増加させる |
|
| |
| |
| ・ |
以上を繰り返すことによって、車体が停止するまでシステムが制動力を調整する |
|
 |
| 図19 ABS作動原理 |
「M.A.-C.ABS」では、前・後輪の制動力を同時に制御する1チャンネル制御方式を採用しています。1チャンネル制御ABSを実現するためには、前輪と後輪のブレーキ配分を有効に利用することが必要です。
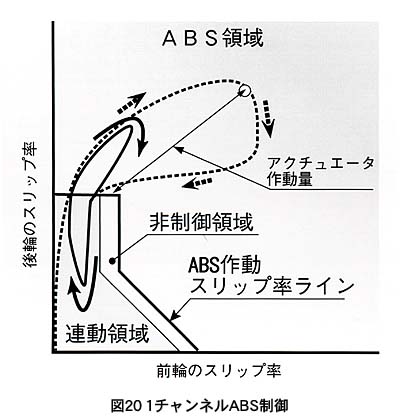
具体的には、前輪のスリップに対し後輪のスリップは車体コントロール性に影響が少ないことに着目し、図20に示すように前輪のABS作動スリップ率は小さく、後輪側を大きくとることで車体コントロール性と制動特性を維持しました。また、さらなる性能向上を図り、以下の手法を用いました。 |
| 路面状態に適した制御 |
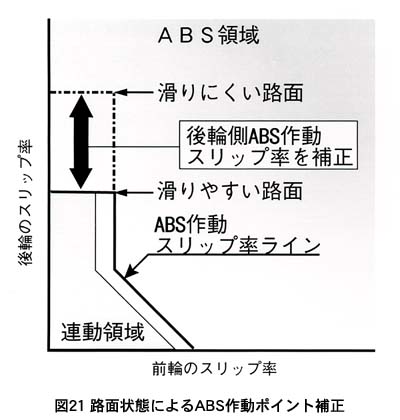
各種のテスト結果によって、直進制動時に車体コントロール性が維持できる後輪スリップ状態(スリップ率)には、路面状態(滑り易さ)によって違いがあることがわかりました。滑りにくい路面では、比較的大きなスリップ率まで車体コントロール性を維持できますが、滑り易い路面では、それを維持できるスリップ率は小さくなります。
「M.A.-C.ABS」では、路面の滑りやすさを後輪スリップの増加スピード(車輪の減速度)によって判断し、これによって図21に示すように後輪側のABS作動ポイントを変化させました。
結果として、路面状態に応じた効果的な制動性能と車体コントロール性の維持が可能となりました。
二輪車用ABSでは、前・後輪を別々に制御する2チャンネル方式が一般的でしたが、今回の「M.A.-C.ABS」は、後輪の挙動から路面状態を判断し、適切なABS作動ポイントとすること(路面状態適応)や、電子制御によるモーター駆動により前輪ブレーキを作動させること(連動効果の利用)などによって、1チャンネル方式のABSを実現することができました。 |
| ABS作動時の連動効果 |
前述のように左レバー操作時には前・後輪連動ブレーキ効果が発生します。そしてその効果をABS制御にも利用しました。
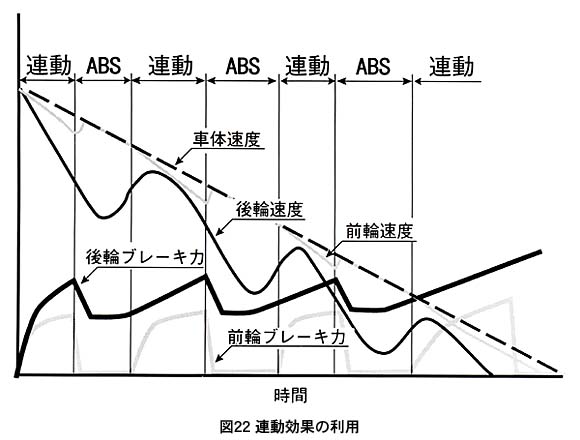
一般的にABS作動は、ブレーキ力を減少させる行程と再び増加させる行程の繰り返しで成立しています。つまりポンピングブレーキをライダーに替わって行っているにすぎないので、入力以上の制動効果は得られません。
「M.A.-C.ABS」では、このブレーキ力を増加させる行程に、前・後輪連動ブレーキ機能を付加することによって、ABS作動時の効果的な制動を実現しました。(図22) |
 |
|
 |
| 図20 1チャンネルABS制御 |
|
図21 路面状態によるABS作動ポイント補正 |
 |
| 図22 連動効果の利用 |
|