HONDA The Power of Dreams
HONDA The Power of Dreams
プレスインフォメーション
T.R.-C.ABS・M.A.-C.ABS
- 1995.09
リニアリティのある連動を実現するための具体化技術
作動原理
(1)
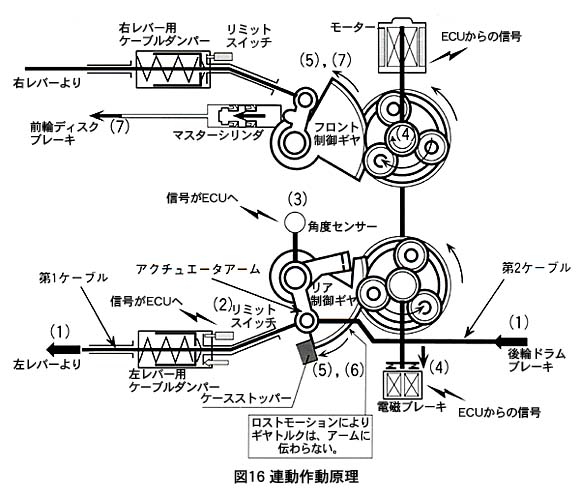
走行中に左レバーを握ると、操作荷重は第1ケーブル〜アクチュエータアーム〜第2ケーブル〜後輪に取り付けられたドラムブレーキへと伝達される
(2)
第1ケーブル中間に取り付けられたケーブルダンパーに設置されたスイッチがケーブル張力に応じて作動する
(3)
アクチュエータアーム軸の回転は、角度センサーによりケーブルのストロークとして検出され、さらに前・後輪に取り付けられた車輪速度センサーによって各車輪の回転速度が検出され、ECUに送信される
(4)
ECUは、入力や後輪ドラムブレーキのアジャスト状態/車体の速度などを演算し、電磁ブレーキ作動信号と連動ブレーキとして付加する前輪ブレーキ力に見合った電流を、モーターに送る
(5)
アクチュエータの電磁ブレーキが、2つのうちの片方の遊星ギアの1要素を拘束し、モーターの回転力が、複式遊星ギアの差動効果により、前・後輪用の制御ギヤに分配される
(6)
後輪用の制御ギヤは、連動側では、制御軸とのロストモーション構造により空転し、アクチュエータケースのストッパーに接触する
(7)
この反力を受け、制御軸に直結した前輪用の制御ギヤは回転し、軸に取り付けられたノッカーによってマスターシリンダーのピストンを押し、油圧ディスクブレーキに液圧を発生させ、前輪の制動力を発生させる
図16 連動作動原理
「M.A.-C.ABS」の左レバー操作による連動は、そのまま後輪ブレーキに伝達させる部分と、その操作荷重を検出しアクチュエータによって付加される前輪ブレーキの部分によって構成されています。(図16)
電子制御によるアクチュエータ作動(モーター駆動)で、リニアリティのある連動ブレーキを実現させるためには、操作状態を適切に判断することが必要です。
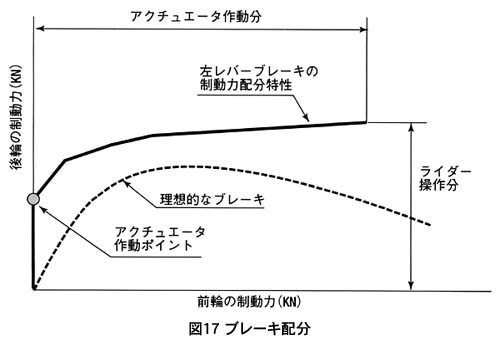
「M.A.-C.ABS」では、一定の入力荷重で作動するケーブルダンパーのリミットスイッチと、ストロークを検出するアクチュエータの角度センサーからの信号で、アジャスト状態と入力荷重を演算するとともに、車体速度による補正も行い、操作状態・状況に応じたリニアリティのあるモーター駆動による前・後輪連動ブレーキを実現させました。(図17)
さらに、モーター駆動は電子制御によって行われるため、制動力の配分特性は自由にセッティングできる特徴を持っています。
アジャスト状態による基本ゲイン
(図18)
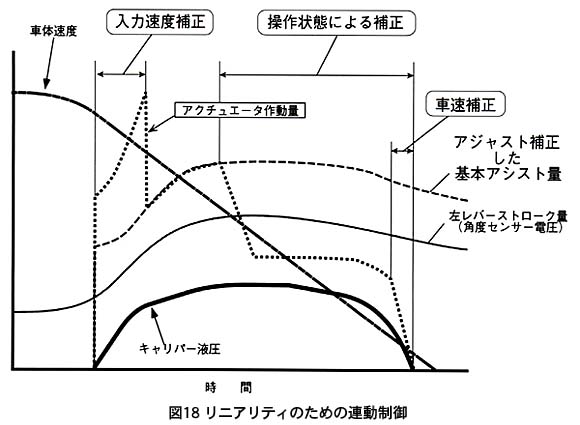
ケーブルダンパーには、皿バネとリミットスイッチからなる荷重検知機構が設置され、スイッチ作動時のレバー操作量(ストローク絶対量)を角度センサーから検出することによって、その量が大きいときはアジャストが緩い状態であることが判別されます。
そして、そのアジャストに応じたゲイン(ストロークに対するアクチュエータモーターの回転力の関係)になるよう調整します。
入力速度による補正
(図18)
素早く左レバーを操作した場合に、前輪ブレーキの作動遅れを少なくするよう、作動初期におけるアクチュエータのモーター回転力を操作スピードによって増加させます。
操作状態による補正
(図18)
前輪ブレーキはアクチュエータのモーター回転力でマスターシリンダーのピストンを押すことによって作動します。基本的には、操作のストロークによってモーターの回転力は決定されますが、実際には、入力操作を増やしていく場合と緩めていく場合では、マスターシリンダーとピストン間のフリクションなどによって、その関係は異なります。
操作状態(レバー入力を増やしている、保持している、緩めている)をストロークの変化率(角度センサーの角速度)から演算し、ストロークに対するモーター回転力をコントロールすることによって、様々な操作状態に応じたリニアリティを実現しました。
車体速度による補正
(図18)
一般的に、停止直前でややブレーキを緩める操作方法が、スムーズなブレーキ操作とされています。また、渋滞中の低速走行時には、停止するというよりも、スピードをコントロールするという意味で、ブレーキが使われています。
このような低速域では、自然な操作感覚とするため、車体速度によってモーターの回転力を補正し、完全停止状態では、前・後輪の連動をカットするセッティングとしています。
以上によって様々な走行条件下で、自然な操作感覚の前・後輪連動ブレーキ機能を実現しました。
図17 ブレーキ配分
図18 リニアリティのための連動制御
プレスインフォメーション トップへ