T.R.-C.ABS・M.A.-C.ABS
- 1995.09
| ABSの高制御性を実現するためには、柔軟な制御ロジックと高い応答性が必要です。また、「Dual Combined Brake System」と結合させるには、前・後輪ブレーキに対し各々入力が2系統あるため、1つのモジュレーターで2つのブレーキ液圧を制御することが必要とされます。 |
| 高制御性の実現 |
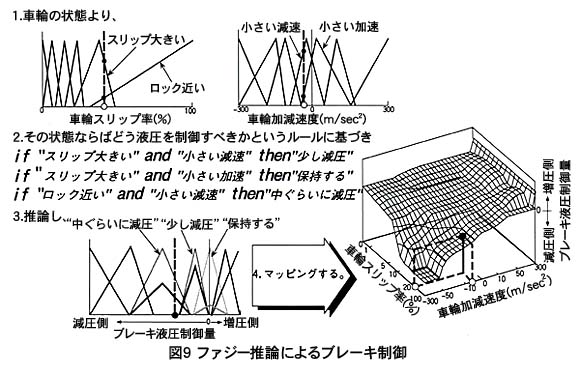
「New ABS」の制御は、エアコンや掃除機などの家電製品に昨今使われているファジー推論を応用したABS制御と、工作機械の位置決めに用いられているモーター制御(PID-PWM制御)を基本としています。
ECUには、装着されているタイヤとブレーキの特性を基本に、数々の社内テストによって修正を施した車輪の状態に対するブレーキ調節量のファジーマップ(図9)が、前・後輪それぞれ16キロバイト容量記憶されています。
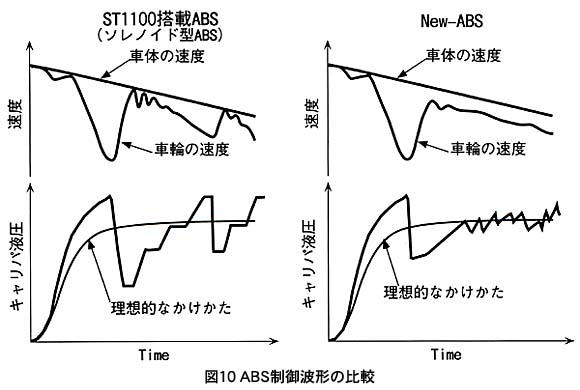
ABS作動時には、1000分の3.6秒毎に最適なブレーキ状態になるようファジーマップが検索され、1000分の0.9秒毎にモーターによるブレーキ力の調整を行います。この高速応答性を実現するために、モーターには最大エネルギー積の高い希土類マグネットと多スロットコアを持ったブラシ付きのDCモーターを採用しました。これらは、車輪のスリップ変動が非常に小さい、連続的な液圧制御を得るために大きく寄与しています。(図10) |
 |
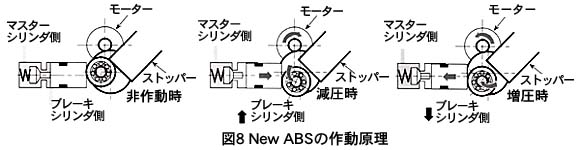
| 図8 New ABSの作動原理 |
 |
| 図9 ファジー推論によるブレーキ制御 |
 |
| 図10 ABS制御波形の比較 |
| 連動化の実現 |
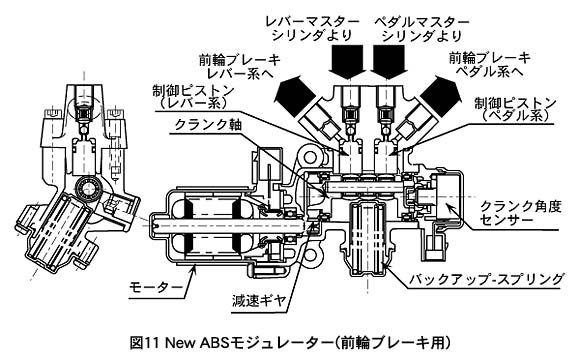
「New ABS」でレバー/ペダルの2系統入力に対応させるために、1つのモーターで2系統の油圧回路を同時制御するようクランク軸を延長し、2つの制御ピストンを配置しました。(図11)
今回、細かなリファインを施した変更のみで、前・後輪独立ブレーキ用から、前・後輪連動ブレーキ用のモジュレーターが生まれました。2つのピストンの1つはレバー入力系、もう1つはペダル入力系をコントロールするものです。 |
 |
| 図11 New ABSモジュレーター(前輪ブレーキ用) |
|