|
|
 |
|
電子制御式“コンバインドABS”(2) |
| ハンドレバー解放時における後輪ホッピングを防ぐ制御 従来の機械制御式コンバインドブレーキシステムは、ハンドレバーの解放時に後輪制動力が増加することで、後輪のホッピングやリリースの遅れが発生する場合があります。しかし電子制御式“コンバインドABS”では、ハンドレバーの入力側/解放側で制動力の配分特性を可変。後輪制動力が増加することのない、後輪のホッピングを防ぐ制御を行います。 |
|
ハンドレバー入力時および解放時の前・後輪制動力配分特性図(イメージ)
|
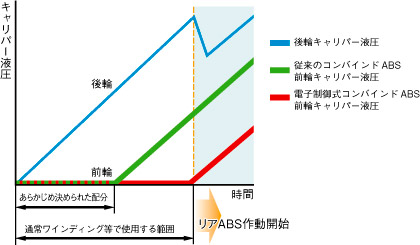
| フットペダル作動時におけるリアブレーキだけの制動 フットペダル作動時には、機械制御式コンバインドブレーキシステムよりも遅いタイミングで、前輪のブレーキ液圧制御を行うよう設定。ワインディングなどを走行する際、フットペダルでリアブレーキだけを効かせた、きめ細かな操作が可能です。 |
|
フットペダル入力時の前・後輪制動力配分特性図(イメージ)
|
|
|