|
|
|
| 旋回時の外側後輪への駆動力伝達を可能にする、世界初の増速機構。 | |||||||
| 旋回時に外側後輪が前輪左右の平均軌跡(前輪車軸中央を通るライン)より外の軌跡を通る場合、前後輪が同じ回転数では外側後輪が前輪回転数に追いつかず、そのため外側後輪に駆動力を伝達できなくなる現象が生じます。そこで、前輪よりも後輪の回転数を増やす必要があります。SH-AWDは、ギアの切り替えによって後輪の回転数を前輪回転数に対して増速する世界初の増速機構をリアドライブユニットに内蔵。旋回時の前後輪の軌跡の違いによらず、外側後輪の駆動力制御による優れた旋回性能を最大限に引き出すことができます。 |
|
||||||
|
|
| 直進時などでは増速を行わないため、増速機構内のプラネタリキャリアとプラネタリギアは一体回転しており、プロペラシャフトとも一体で回転しています。増速が必要な条件になるとプラネタリキャリアがケースに固定され、駆動力はプラネタリギアを介してハイポイドギアに伝達されます。このときのギア比が約5%増速されるように設定しています。 |
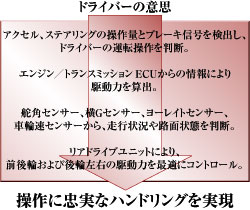
| ドライバーの操作に限りなく忠実に応えるための高精度な制御システム。 |
| 駆動力制御ロジックは、ドライバーの意思を最大限に尊重するという考えから、ドライバーの操作を情報源とする能動的なフィードフォワード制御をメインに構築。さらに車両挙動をもとにしたフィードバック制御をあわせ持つことで、ドライバーの操作に忠実に応える高い精度を実現しています。 |
| ■制御方法 | ■制御ロジック |
 |
 |
| ■SH-AWDシステム構成 | |
 |
|
| 軽量化や静粛性に貢献する、CFRPプロペラシャフト。 |
| 後輪へ動力を伝達するプロペラシャフトにCFRP(炭素繊維強化プラスチック)を採用。 軽量化への貢献はもとより、衝突時の衝撃吸収や静粛性能向上に取り組んでいます。 |
|
|
| CFRP材を採用することで、同様のプロペラシャフトを鉄でつくった場合と比べ約5.3kgの軽量化を達成しています。 |
|
|
| CFRPプロペラシャフトは、前側のNo.1チューブと後側のNo.2チューブで構成。衝突時には、No.1チューブ後端で圧壊し、衝撃を吸収する構造としています。 |
|
|
| プロペラシャフトは5,000回転を超える高回転に達するために、わずかなアンバランスであっても大きな振動となります。そこで部品ひとつひとつに高い精度を求め、最適なバランス調整を行い、静粛性を高めています。 |
|
|
|