HONDA The Power of Dreams
HONDA The Power of Dreams
プレスインフォメーション
ACCORD
- 1997.09
基本前提として捉えたうえで多角的に取り組み、
世界最高水準をめざした、先進・高機能な安全性能。
クルマのすべての基本前提となる安全性能。走る楽しさ、操る楽しさも、この性能が充分に備わってこそ、実感できるものです。そのためには、まずクルマの基本性能である、「走る性能」、「曲がる性能」、「止まる性能」を可能な限り高めること。これを高次元でバランスさせたうえで、さらなる安全性能の向上に取り組んでいます。危険な状況をできるだけ減らし、事故を未然に防ぐための安全性能=アクティブセーフティ。万一の衝突の際に乗員を保護する安全性能=パッシブセーフティ。
Newアコードシリーズは、これらの性能をさまざまな方向から総体的に検証。アクティブセーフティでは車両挙動の乱れを安定化制御する新たな技術を開発。パッシブセーフティでは将来を見越した安全基準に対応するなど、世界レベルの高水準な安全性能を身に付けています。
ホンダ独自のクルマづくりの基本にある安全思想、
「グローイングセーフティ」。
●
クルマの基本研究段階から行なう安全への取り組み。
●
事故を未然に防ぐためのアクティブセーフティ。
●
乗員を保護するためのパッシブセーフティ。
●
安全運転の普及・向上のための取り組み。
これらを融合し、「安全性と走る楽しさが両立するレベル」への絶えまない成長と発展を図る。これがホンダの「グローイングセーフティ」です。Newアコードシリーズの開発コンセプトには、この思想が色濃く反映されています。
(1)
●
5リンク・ダブルウイッシュボーン・リアサスペンション
●
VSA(車両挙動安定化制御システム)
・
ABS(4輪アンチロックブレーキシステム)
・
TCS(トラクションコントロールシステム)
・
横すべり抑制
●
ディスチャージヘッドライト
●
ハイマウント・ストップランプ
●
ホンダ・ナビゲーションシステム
(2)
●
高剛性&全方位衝突安全設計ボディ
●
運転席用&助手席用SRSエアバッグシステム
●
ドアビーム
●
フロント3点式ロードリミッター付ダイレクトクランプELRシートベルト
●
前後大型バンパー
(3)
安全情報提供活動
■
クルマの「知識」「取扱い」「運転技術」「安全技術」についての正しい理解と普及活動
■
安全小冊子(セーフティドライビング・セーフティポインツ)を全ホンダ車に配備
実践的な安全運転トレーニング(交通教育センター)
■
お客様個人へのドライビング・スクール開催
■
企業内運転従事者への安全運転講習
財団法人「国際交通安全学会」の研究活動への支援
ACTIVE SAFETY
アクティブセーフティ/VSA:
ABS、TCSに横すべり抑制を加えた車両挙動安定化制御システム。オーバーステアやアンダーステアなど車両の挙動変化を抑制し、運転操作の余裕を確保。
ACCORD
TORNEO
アクティブセーフティをさらに向上させた
国産FF車初、VSA
※
(車両挙動安定化制御システム)。
クルマは走行状況の変化などによって、挙動の乱れを起こします。それは、路面の急激な変化などによる環境要因や、ドライバーのステアリングあるいはブレーキ操作などによる人的要因が考えられます。しかも挙動が乱れた場合、適切な操作ができず、その乱れをさらに助長してしまいがちです。こうしたコントロールができにくい急激な車両の挙動変化を抑えることは極めて重要であり、アクティブセーフティの大きな目的であると考えました。ホンダではこれまで、日本車初のABS(4輪アンチロックブレーキシステム)やFF車世界初のTCS(トラクションコントロールシステム)を開発するなど、積極的に取り組んできました。VSAは、このABSとTCSに、さらに車両の横すべり抑制を加えた「車両挙動安定化制御システム」で、急激な車両の挙動変化を抑制し、ドライバーに次の操作(クルマを冷静にコントロールする)のための余裕を確保します。また、雨天時や雪道などの走行時には、路面からの外乱を安定方向に制御することでドライバーの過度な緊張を低減し、運転にゆとりを与えます。このシステムの開発にあたっては、ホンダFF車本来の高い安定性を活かし、操る楽しさをスポイルしないことを考慮したうえで、「前輪制御による車両の挙動安定化」という独自のコンセプトを確立。具現化には車両運動性能理論[ベータ・メソッド]による解析を取り入れ、走りとのバランスを高次元で図りながら、シンプルで信頼性の高い制御システムを完成しています。
(アコード&トルネオSiR) ※VSA:Vehicle Stability Assist
◆VSA概念図
車両の横すべりとは…旋回中の車両がタイヤの旋回性能を超え、
●
後輪が横すべりを起こし、車両が旋回内側に巻き込む(スピン)現象
=オーバーステア。
●
前輪が横すべりを起こし、車両が外側にはらんでしまう現象
=アンダーステア。
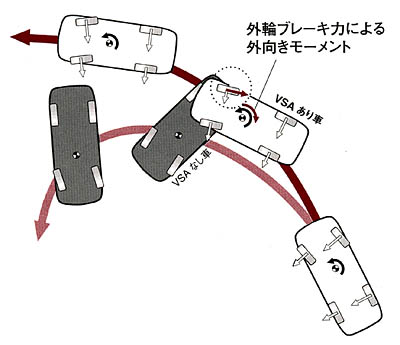
■オーバーステア制御
ステアリングの急激な切り過ぎなどによって起こりがちな、後輪スリップによる車両の巻き込みに対して、フロント外輪へのブレーキ制御によって外向きのモーメントを発生させ、同時にフロントのコーナリングフォースを低減。スピンモーメントを減少することで、車両を安定化させます。
●
検知および制御
横G、舵角、車速から、ドライバーが意図するヨーレイト(目標ヨーレイト)を算出。実際のヨーレイトがそれより大きい時には、車両のヨーレイトを減少させるようにフロント外輪にブレーキをかけます。
■オーバーステア制御
=フロント外輪ブレーキ
■加速アンダーステア制御
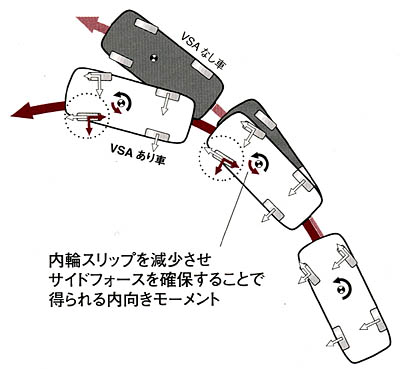
旋回加速時のアクセルの踏み過ぎなどによって起こりがちな、駆動輪のスリップによる軌跡のはらみに対して、エンジントルクの低減とフロント内輪へのブレーキ制御によって前輪のサイドフォースを確保。内向きモーメントを発生させることで、トレース性を高めます。
●
検知および制御
舵角と車速から、ドライバーが意図するヨーレイト(目標ヨーレイト)を算出。実際のヨーレイトがそれより小さい時には、車両のヨーレイトを増大させるようエンジン出力を低減するとともに、必要に応じてフロント内輪にブレーキをかけます。
■加速アンダーステア制御
=エンジントルク低減
+
フロント内輪ブレーキ
■発進制御
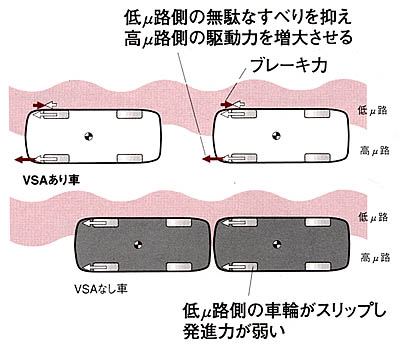
発進時など左右輪で路面状況が異なる場合は、エンジントルクが低μ路側へ伝達されてしまい大きな駆動力を得ることができないため、低μ路側の車輪にブレーキをかけ、高μ路側の車輪にエンジントルクを回しこむことで、より力強い発進・加速を獲得します。
■発進制御
■旋回制動制御
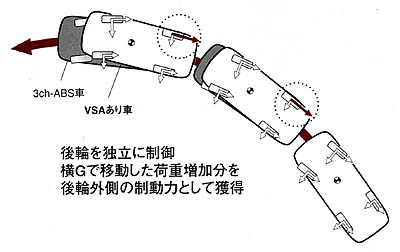
高横G旋回を横Gセンサーが検出すると、ABSを4チャンネル制御に切り換え(直進および低横G旋回時は3チャンネル)、後輪外側にも大きな制動力を持たせることで、旋回制動時の性能を向上しています。
■旋回制動制御
プレスインフォメーション トップへ