![ژش‘¬/ژشٹشگ§Œن‹@”\[IHCC]‚جٹî–{گ§Œنƒpƒ^پ[ƒ“پiٹT”Oگ}پj](image/subtitle_4.gif) |
| ’葬گ§Œنپi‘O‘–ژش‚ب‚µپj |
 |
ٹَ–]‚جژش‘¬‚ةگف’è‚·‚邱‚ئ‚ة‚و‚èپA’葬‘–چs‚ًٹJژnپB |
| Œ¸‘¬گ§Œنپi‘O‘–ژشŒں’mپj |
 |
ژ©ژشگü‚ج‘O‘–ژش‚ھگف’èژش‘¬‚و‚è’x‚¢ڈêچ‡پAƒXƒچƒbƒgƒ‹‚âƒuƒŒپ[ƒL‚جگ§Œن‚ًچs‚¢Œ¸‘¬پB‘O‘–ژش‚ج‹}ƒuƒŒپ[ƒL‚âٹ„‚èچ‚ف‚ب‚ا‚إŒ¸‘¬‚µ‚«‚ê‚ب‚¢ڈêچ‡‚حپAŒxچگ‰¹‚ئ•\ژ¦‚إƒhƒ‰ƒCƒoپ[‚ج‘€چىپiƒuƒŒپ[ƒL“™پj‚ً‘£‚µ‚ـ‚·پB |
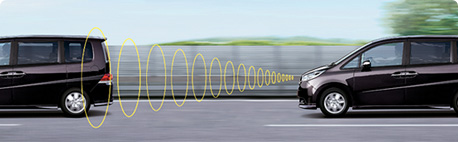
| ’اڈ]گ§Œنپi‘O‘–ژش‚ة’اڈ]پj |
![’اڈ]گ§Œنپi‘O‘–ژش‚ة’اڈ]پj](image/seigyo3.gif) |
‘O‘–ژش‚جژش‘¬•د‰»‚ةچ‡‚ي‚¹‚ؤپAگف’肵‚½ژشٹش‚ة‚ب‚é‚و‚¤’اڈ]پBپiژش‘¬‚جڈمŒہ‚حگف’èژش‘¬‚ـ‚إپj |
| ‰ء‘¬گ§Œنپi‘O‘–ژش—£’Eپj |
 |
ژ©ژشگü‚ج‘O‘–ژش‚ھژشگü•دچX‚µ‚½ڈêچ‡‚حپAگف’èژش‘¬‚ـ‚إ‚ن‚é‚â‚©‚ة‰ء‘¬‚µپA’葬‘–چs‚ة–ك‚è‚ـ‚·پB |
پ›ƒŒپ[ƒ_پ[Œں’m”حˆحپFژش—¼‘O•û100mˆب“àپ@ٹp“x16“x
پ›چى“®ژش‘¬پF45km/hپ`100km/h
پ›ژشٹش‚ح3’iٹK‚ةگف’è‰آ”\
|
| پœIHCC‚ح‘O•û•s’چˆس‚جٹ댯گ«‚ً‰ًڈء‚·‚é‘•’u‚إ‚ح‚ ‚è‚ـ‚¹‚ٌپBژشٹش‹——£گ§ŒنپAژشٹشگع‹كŒx•ٌپAŒ¸‘¬”\—ح‚ة‚حŒہٹE‚ھ‚ ‚è‚ـ‚·پBIHCC‚ً‰كگM‚¹‚¸پA‚آ‚ث‚ة‘O‘–ژش‚âژüˆح‚جڈَ‹µ‚ة‹C‚ً‚آ‚¯پAˆہ‘S‰^“]‚ً‚¨ٹè‚¢‚µ‚ـ‚·پBپœ“¹کHڈَ‹µپA“VŒَڈَ‹µ‚ة‚و‚ء‚ؤ‚حژg—p‚إ‚«‚ب‚¢ڈêچ‡‚ھ‚ ‚è‚ـ‚·پBپœ‚²ژg—p‚ج‘O‚ة•K‚¸ژوˆµگà–¾ڈ‘‚ً‚¨“ا‚ف‚‚¾‚³‚¢پB |
 ’“ژشژپAƒhƒA‚âƒ{ƒ“ƒlƒbƒgپAƒeپ[ƒ‹ƒQپ[ƒg“™‚جƒچƒbƒN‚ً•sگ³‚بژè’i‚إ‰ًڈœ‚·‚é‚ئƒzپ[ƒ“‚ئƒnƒUپ[ƒhƒ‰ƒ“ƒv‚إژüˆح‚ة’m‚点‚éƒZƒLƒ…ƒٹƒeƒBƒAƒ‰پ[ƒ€‚ًƒ^ƒCƒv•تگف’èپB‚ـ‚½پAƒLپ[‚ئژش—¼‚ج“dژq”Fڈط‚ة‚و‚è–h“گگ«‚ًچ‚‚ك‚éƒCƒ‚ƒrƒ‰ƒCƒUپ[‚حپA‘Sƒ^ƒCƒv‚ة•Wڈ€‘•”ُ‚µ‚ؤ‚¢‚ـ‚·پB
’“ژشژپAƒhƒA‚âƒ{ƒ“ƒlƒbƒgپAƒeپ[ƒ‹ƒQپ[ƒg“™‚جƒچƒbƒN‚ً•sگ³‚بژè’i‚إ‰ًڈœ‚·‚é‚ئƒzپ[ƒ“‚ئƒnƒUپ[ƒhƒ‰ƒ“ƒv‚إژüˆح‚ة’m‚点‚éƒZƒLƒ…ƒٹƒeƒBƒAƒ‰پ[ƒ€‚ًƒ^ƒCƒv•تگف’èپB‚ـ‚½پAƒLپ[‚ئژش—¼‚ج“dژq”Fڈط‚ة‚و‚è–h“گگ«‚ًچ‚‚ك‚éƒCƒ‚ƒrƒ‰ƒCƒUپ[‚حپA‘Sƒ^ƒCƒv‚ة•Wڈ€‘•”ُ‚µ‚ؤ‚¢‚ـ‚·پB