高所調査用ロボットについて | 主な仕様 | 動作イメージ
What's New
- [2013.09.05]
- [高所調査用ロボット 開発ストーリー] 動画を追加しました。
- [2013.06.18]
- [高所調査用ロボット 開発ストーリー] 技術は人のためにー ASIMOの技術、福島第一原発へ
- [2013.06.17]
- 高所調査用ロボットが追加されました
![[高所調査用ロボット 開発ストーリー] 技術は人のために アシモの技術、福島第一原発へ](img/bunner5.jpg)
「高所調査用ロボット」
東京電力 福島第一原子力発電所で稼働を開始
Hondaと独立行政法人産業技術総合研究所(以下、産総研)は、東京電力 福島第一原子力発電所向けに、遠隔操作で原子炉建屋内1階高所の狭い箇所などの構造把握と現場調査を行う「高所調査用ロボット」を共同で開発しました。同ロボットは、2013年6月18日より建屋内での稼働開始を予定しています。
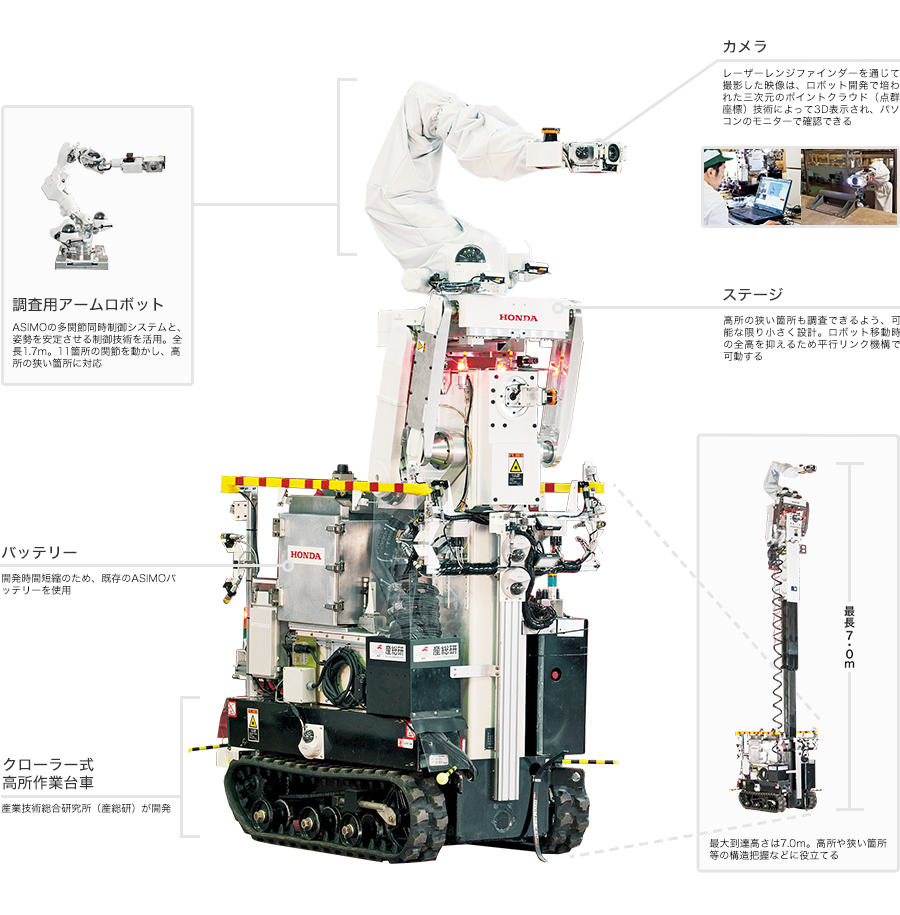
東京電力株式会社から提供された現場についての情報をもとに、ニーズに適合するロボットの開発を進めてきました。上部に設置した調査用アームロボット部分をHondaが、クローラー式高所作業台車を産総研が担当しました。
調査用アームロボットは、ヒューマノイドロボット「ASIMO」の開発で培った、下記の技術を応用しています。
- 三次元のポイントクラウド(点群座標)により、調査対象の周囲の構造物を立体的に表示する技術
- 多関節を同時に制御するシステム
- アームが周囲の構造物に接触した際にその衝撃を吸収する制御技術
これらの技術により、調査用アームロボットは、原子炉建屋内の構造物が入り組んだ状況でも、多数の関節を同時に制御することで、隠れていて見えない対象物も容易に捕捉し、アームの先端に設置したズームカメラやレーザーレンジファインダー、線量計を使い、詳細な画像や三次元形状データの確認、線源の特定などを可能にしています。
クローラー式高所作業台車は、産総研が培ってきた遠隔操作技術をもとに、低重心構造とし転倒安定性を高めた高所作業車にカメラ、ライト、レーザーマーカーなどの配置を工夫して取り付け、400mの光ファイバーを用いた有線LANおよび無線LANを介して遠隔操作できるようにしています。
さらに、Hondaと産総研は、直感的に分かりやすい遠隔操作インターフェイスを共同で開発しました。これにより、免震重要棟などから高所調査用ロボットを遠隔操作して、原子炉建屋内の暗くて狭い箇所を移動させることができ、また調査箇所にてアームロボットのマストを伸ばして、アームの先端が構造物にぶつかることなく、7mの高所に到達させ調査することを可能としました。
技術は人のために
Hondaは、人の生活空間で役に立つロボットとして、ASIMOの開発を進めるとともに、ヒューマノイドロボットの災害現場における適用の可能性などについて調査および研究を行ってきました。今回の調査用アームロボットに続き、今後は防災や減災など災害への対応を目的としたヒューマノイドロボットの開発も加速させていきます。
産総研は、一昨年の東日本大震災以降、これまでに「津波被災地の海水の地下への浸透状況の調査」「気仙沼〜絆〜プロジェクト」、「放射線測定の実施・協力」「植物性放射性セシウム汚染物の除染・減容」などの復興支援を行ってきました。東京電力 福島第一原子力発電所廃炉措置に関しても、ロボット技術を核とした技術により、引き続き貢献していきます。
主な仕様
基本仕様
| 全長 | 1.8m |
|---|---|
| 全幅 | 0.8m |
| 全高 | 1.8m(運搬、移動時) |
| 最大到達高さ | 7.0m |
| 重量 | 約1100kg |
| アームロボット | 全長1.7m、11自由度 |
| 走行性能 |
最大速度2km/h 最大斜度15度(前後)、20度(左右) 最大踏破段差60mm |