
Hondaパーキングパイロットについて
駐車や出庫で運転を支援するシステムです。カメラとソナーセンサーによって駐車スペースの検知、駐車や出庫するための経路生成を行います。また、駐車や出庫の際の加減速、ハンドル操作やシフト操作を支援します。
システムは以下の場合に使用できます。
|
駐車パターン |
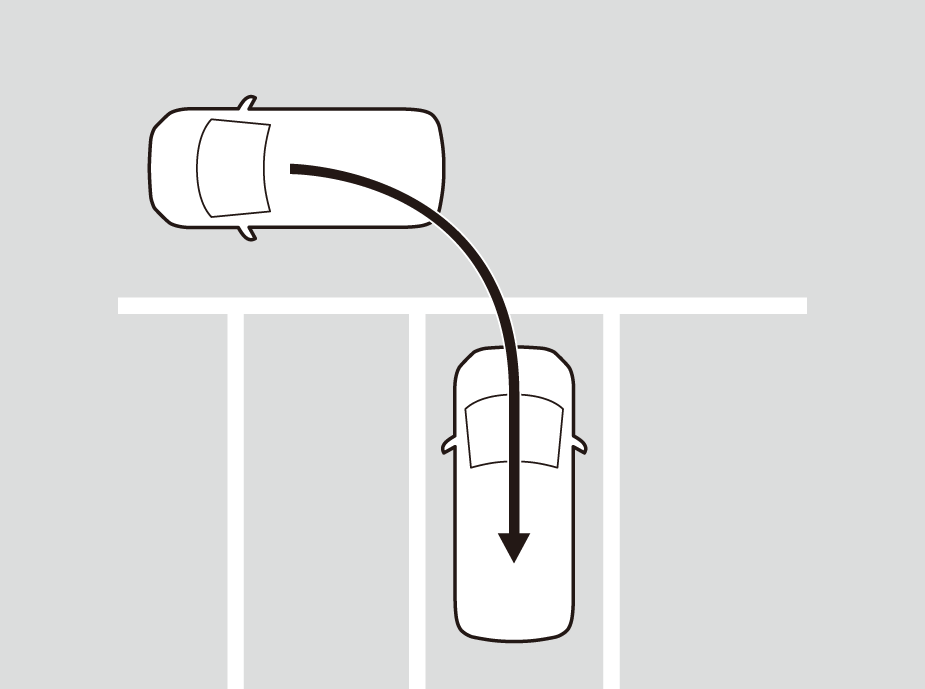
区画線のある駐車場 |
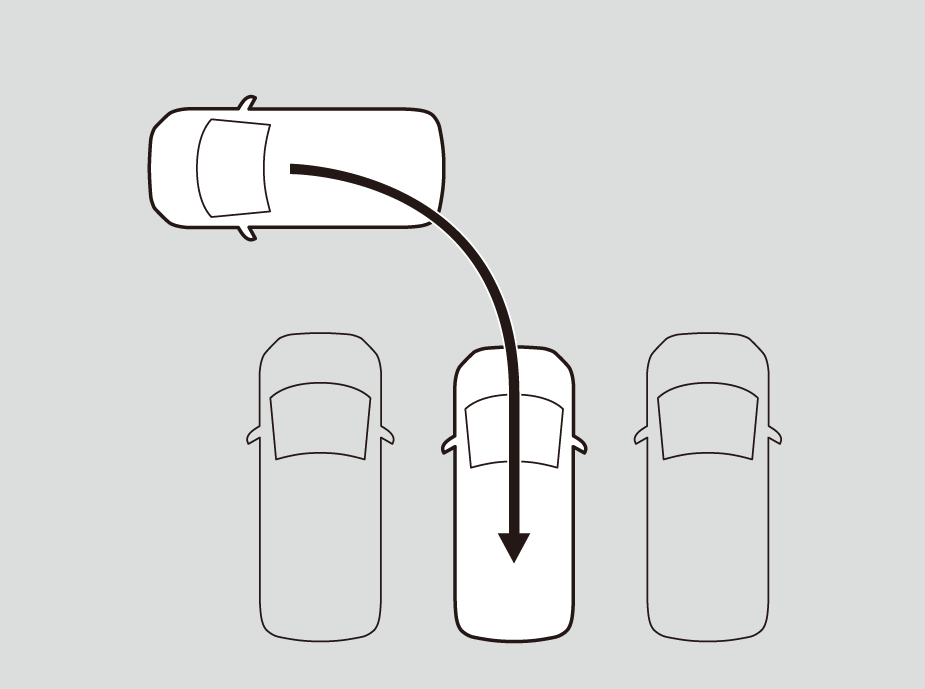
区画線のない駐車スペース |
|---|---|---|
|
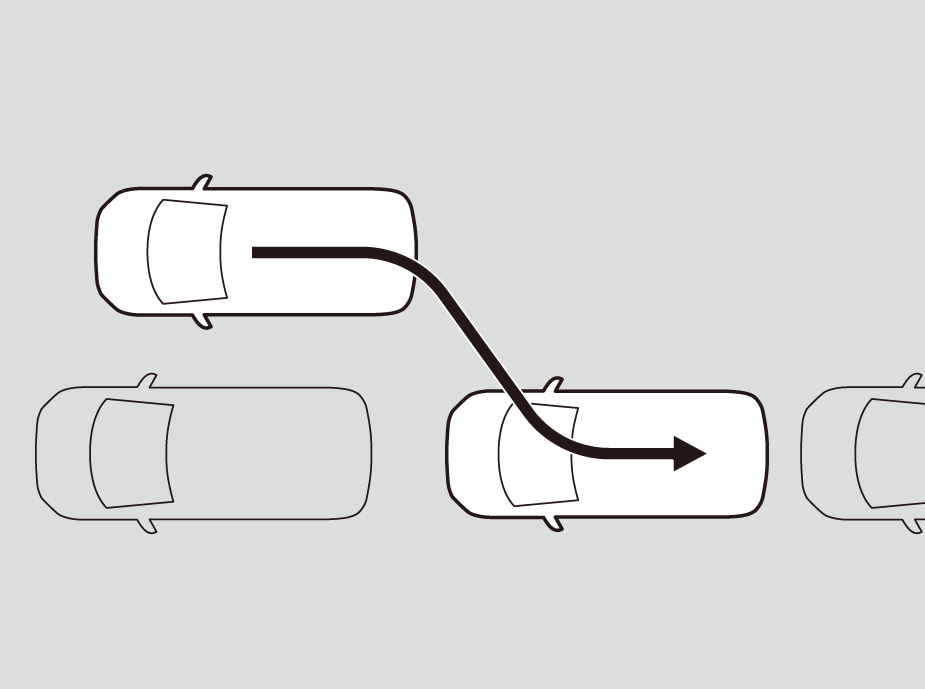
バック駐車 |
 |
 |
|
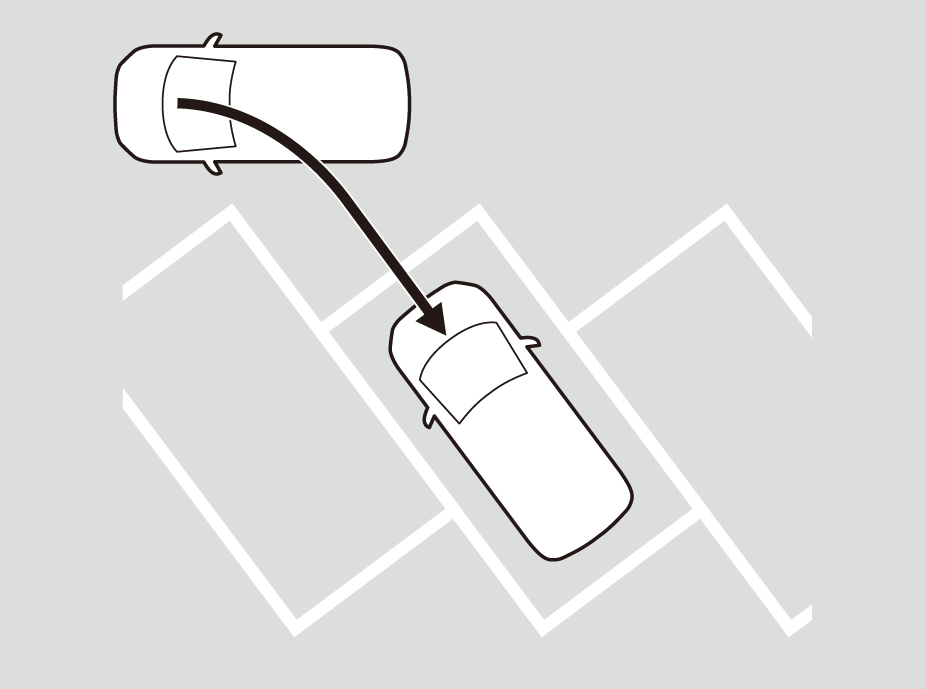
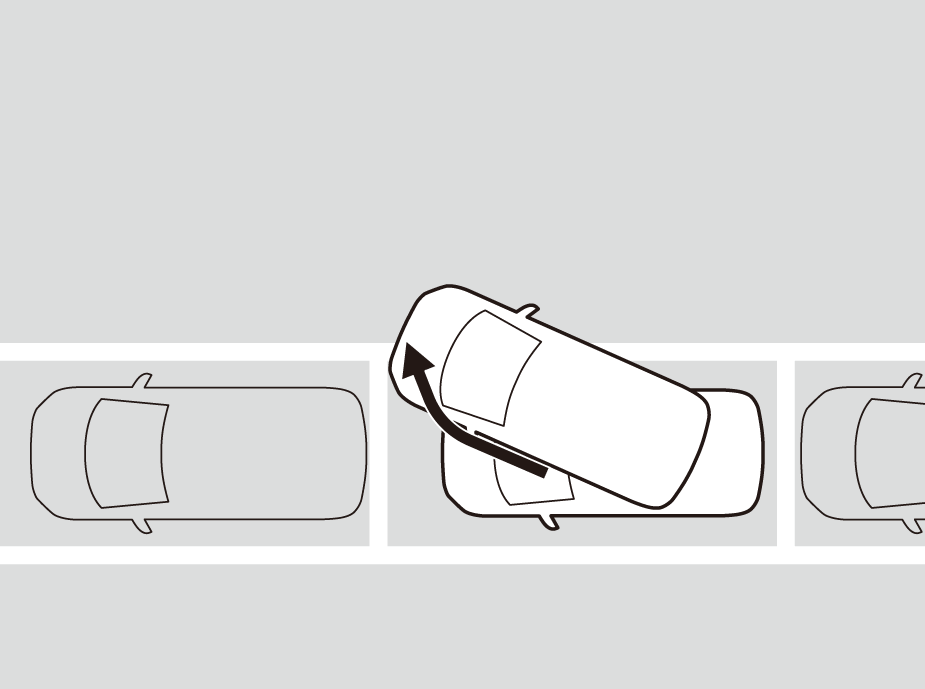
斜めバック駐車 (区画線が3本以上あり車両が2台以上の駐車ができるときに駐車候補枠の検知が可能) |
 |
- |
|
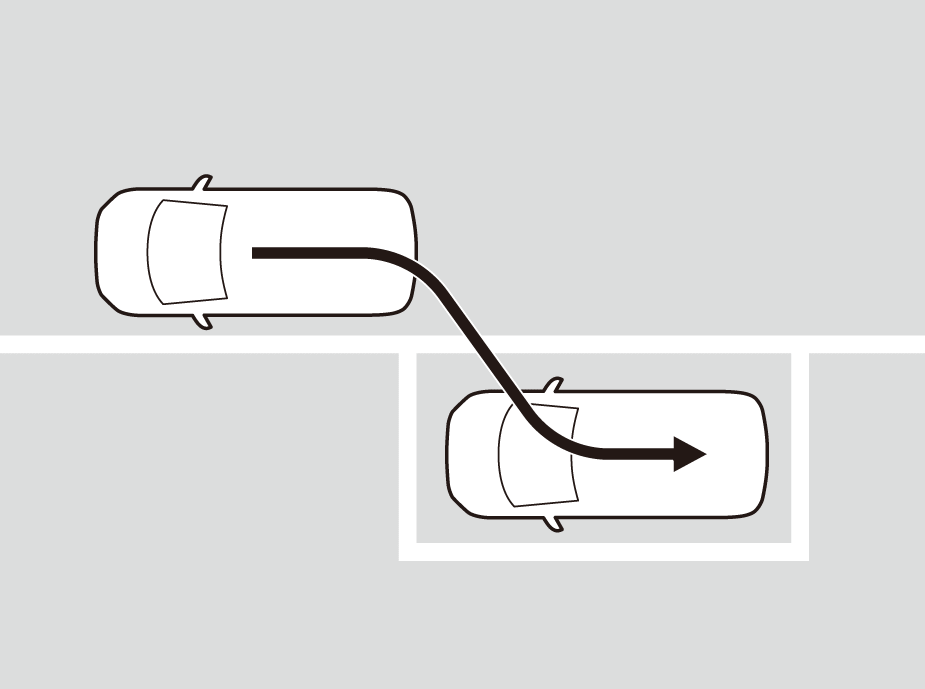
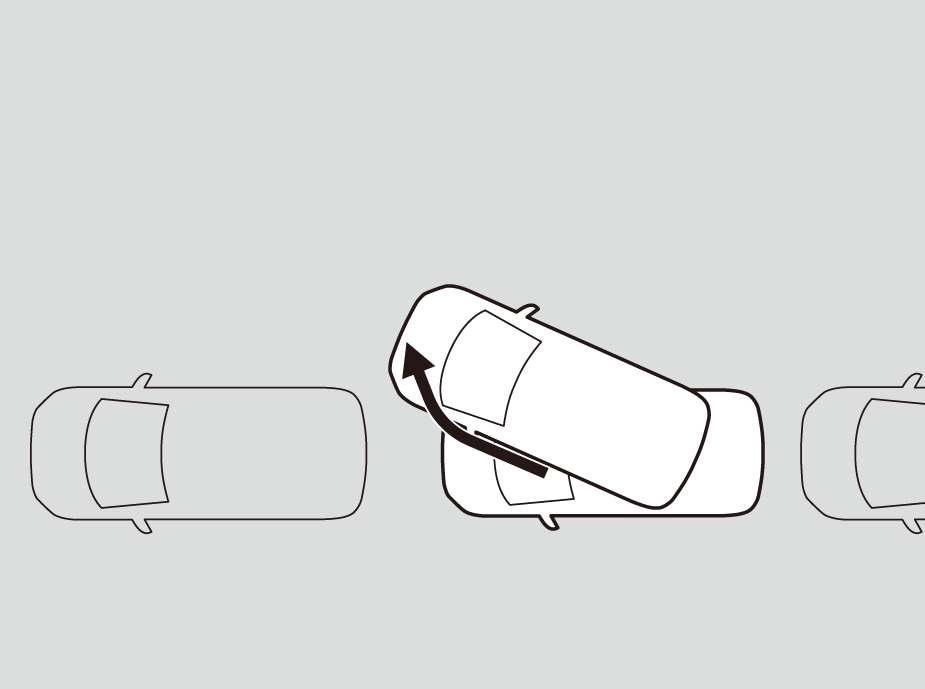
縦列駐車 |
 |
 |
|
縦列出車 (前車がある場合に限る) |
 |
 |
 注意
注意
Hondaパーキングパイロットは、自動駐車システムではありません。
あくまでも運転者を支援するためのシステムです。機能に頼った運転をすると、思わぬ事故につながるおそれがあります。
システム作動中に以下の状況になった場合、停車またはシステムの中止などをし、運転者自身の操作で回避してください。
- 障害物や人、他の車両等に接触しそうなとき
- 乗り越えてはいけない縁石や段差、輪留め等に入りそうなとき
- 進入してはいけないエリアに入りそうなとき
通常の駐車時と同様に、必ず目視で周囲の安全を直接確認してください。
使用に適さない場所では使用しない。
傾斜がある場所や、駐車スペースの形状や状況など、Hondaパーキングパイロットの使用に適さない場所では使用しないでください。
注意
ハンドルに手などが巻き込まれないように注意する。
ハンドルが自動で回ります。手などが巻き込まれないように注意してください。
Hondaパーキングパイロット作動中は、車両停止、または走行時に音が聞こえることがあります。
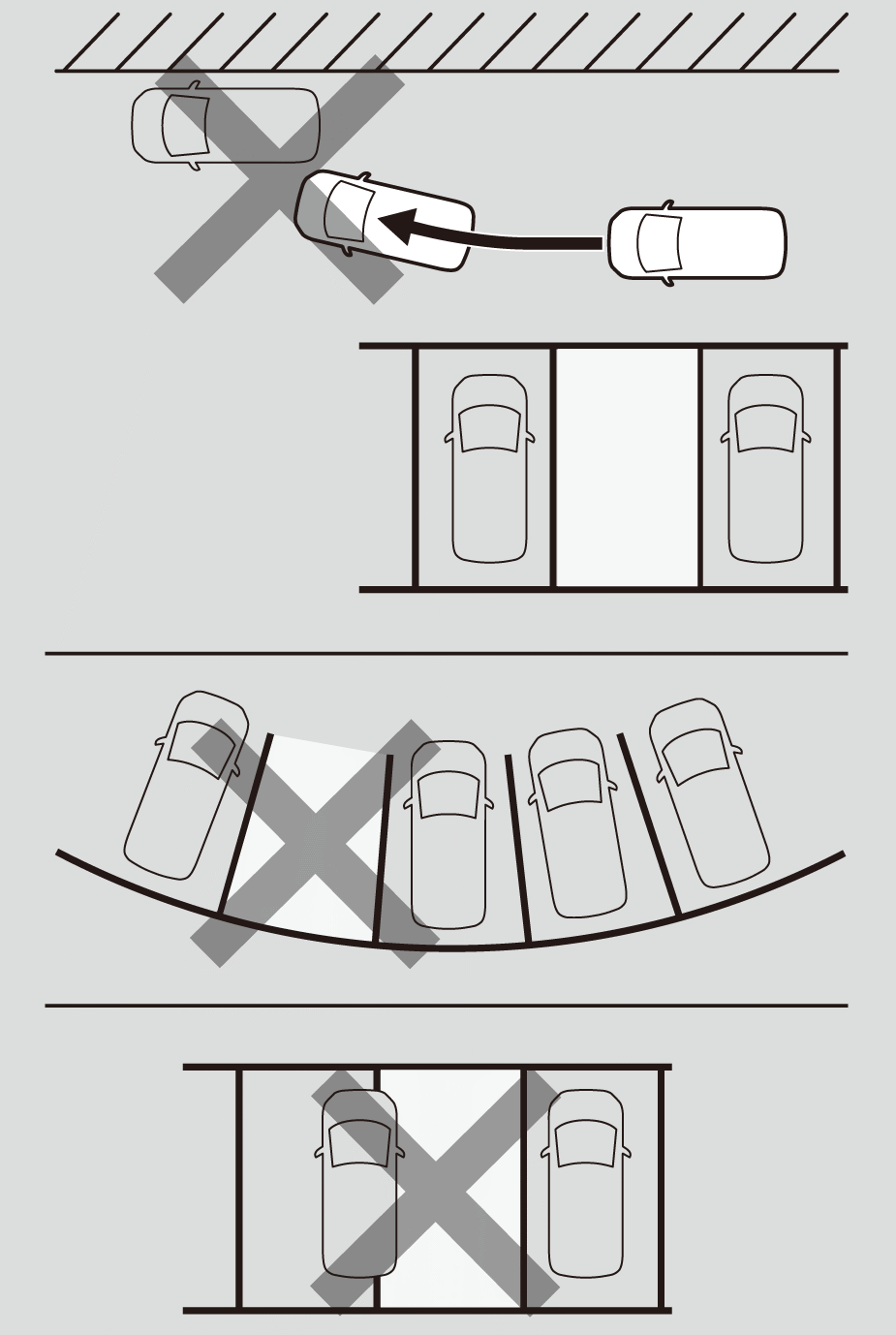
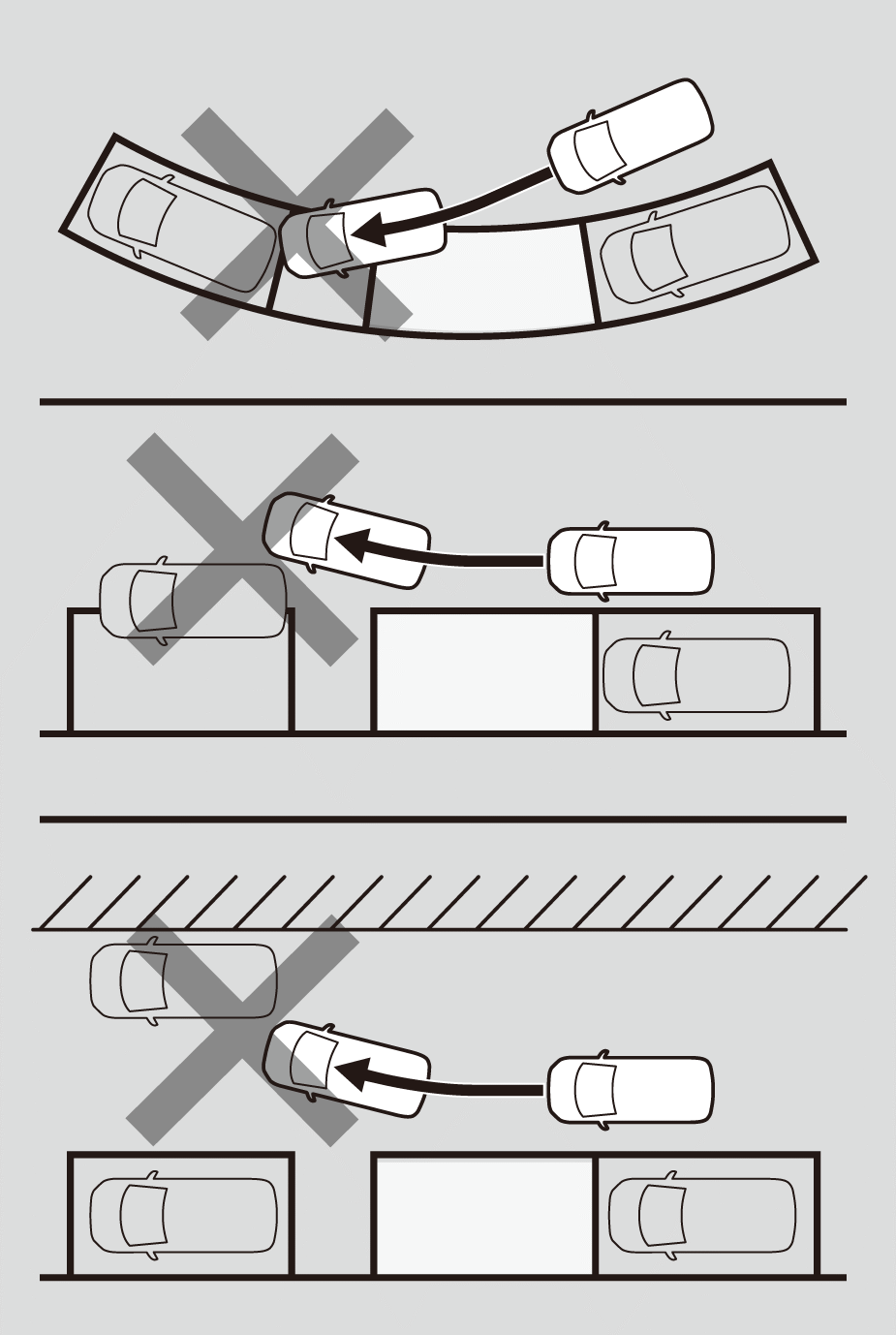
システムの使用に適さない場所
前進や後退ができない場所、スリップしやすい場所や以下のような駐車スペースは、Hondaパーキングパイロットの使用に適しません。
- 傾斜している場所
- 段差や凹凸のある場所
- 砂地や砂利、草地などの舗装されていない場所
- 雪が積もっている場所
- 凍結路など滑りやすい場所
- 通路幅が狭い場合
- 前進する方向に障害物がある場合
- 駐車スペースが湾曲している場合
- 周囲の車両が駐車枠からはみ出している場合
|
バック駐車 |
縦列駐車・出庫 |
|---|---|
 |
 |