|
|

|
||||||||||||||||||||||||||||||||||||||||||
|
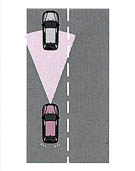
近未来の自動運転技術を見据えた、 高速走行時における車速/車間制御システム、 IHCC(インテリジェント ハイウェイ クルーズ コントロール)。  高速道路での走行を、より快適に、より安全に提供するために開発された、 IHCC(インテリジェント
ハイウェイ クルーズ コントロール)を採用しました。 この新システムは、フロントグリル中央に設けられたレーザーレーダーにより、 先行車の動きを検知。そこから得られた情報をもとに、状況を的確に判断し、
先行車追従、自車の積極的減速、そして接近警報などを自動的に行なうものです。 これにより、ドライバーの運転負担を大幅に軽減 。安全性をしっかりと確保しながら、
快適な高速クルーズを実現します。
(Vタイプにメーカーオプション)
高速道路での走行を、より快適に、より安全に提供するために開発された、 IHCC(インテリジェント
ハイウェイ クルーズ コントロール)を採用しました。 この新システムは、フロントグリル中央に設けられたレーザーレーダーにより、 先行車の動きを検知。そこから得られた情報をもとに、状況を的確に判断し、
先行車追従、自車の積極的減速、そして接近警報などを自動的に行なうものです。 これにより、ドライバーの運転負担を大幅に軽減 。安全性をしっかりと確保しながら、
快適な高速クルーズを実現します。
(Vタイプにメーカーオプション)
|
||||||||||||||||||||||||||||||||||||||||||

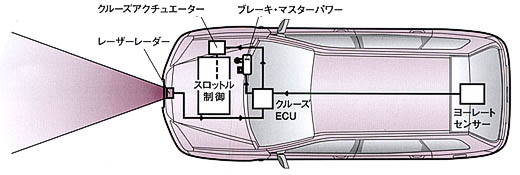
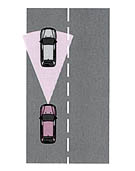
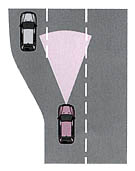
IHCCシステム構成図
|
||||||||||||||||||||||||||||||||||||||||||
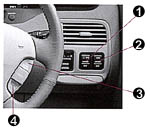
システムの作動状況は、スピードメーター下の液晶サブメーターに表示されます。
IHCCでは、安全性確保のため、厳格に作動環境を設定しています。
|
||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||