


E0(1986)
2本足で歩くには?まず2足で歩かせてみる。
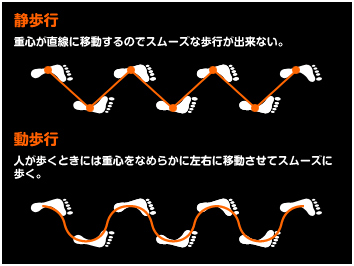
2本足で歩くしくみの研究でつくった最初のロボット「E0」。まず「歩くこと」を研究し2本足で歩くのには、いつも体の重心が足の裏(うら)の範囲(はんい)に入るように歩く「静歩行」と、体の動く勢いを利用してスムーズに歩くために重心を分散(ぶんさん)させた「動歩行」があることが分かりました。E0はまずこの「静歩行」による移動で足をこうごに出して歩くことに成功しました。このころ「静歩行」で歩いていたため、なんと1歩に5秒もかかっていました。

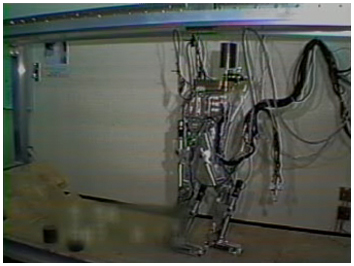
E0の動き