



2002年発表の技術
- 人の姿勢やしぐさの意味を理解して自律的に行動できる知能化技術を搭載した新型「ASIMO」を発表しました。
接近する人に挨拶する、人に追従する、指示された場所に移動する、また顔を認識して名前を呼ぶなど人応答機能が大きく進化。さらにインターネットなどを介した情報の提供や、案内などのサービスを可能としました。
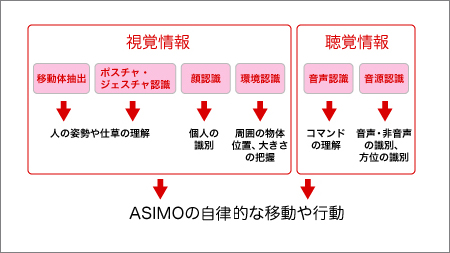
- ▌認識技術によるコミュニケーションの進化
- 移動体抽出やポスチャ・ジェスチャ認識など、認識技術によるコミュニケーションの進化を実現しています。
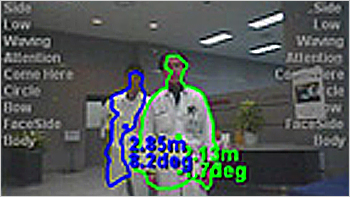
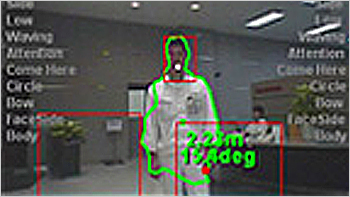
- ▌移動体抽出
頭部に搭載したカメラの画像情報から複数の移動体を検出し、
その移動体までの距離、方向を認識する。
・人の動きをカメラで追う。
・人に追従して歩行する。
・人の接近を検知して挨拶をする。など
-
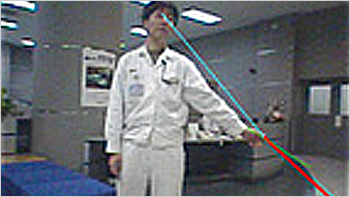
▌ポスチャ・ジェスチャ認識
画像情報から手の位置と動きを検出し、姿勢(ポスチャ)と動作(ジェスチャ)を認識。
音声だけでなく人の自然な動きに対しても応答することが可能となった。
・人が手で指し示した場所を推定し、その場所に移動できる。(ポスチャ認識)
・人が手を差し出すと、握手をする。(ポスチャ認識)
・人が手を振ると、手を振り返す。(ジェスチャ認識)など
-
▌環境認識
周辺の環境を認識し、障害物などの位置を把握して、衝突回避、迂回移動が可能。
・などの移動障害物が目の前に急に現れた時に停止する、立ち去ると歩行を再開する。
・静止障害物を見つけると迂回する。など
-
▌音源識別
音源位置を特定する能力が向上。また、音声とそれ以外の音を識別する。
・名前を呼んだ人の方向を向いてその人を見る。
・話している人の顔を見て応答する。
・突発的な異常音(落下音、衝撃音など)を検知してその方向を見る。など

- ▌顔認識
人およびASIMOの双方が動きながらの状態でも顔認識が可能。
・登録された人の顔を認識して、名前を呼ぶ、用件を伝える、案内をする。
・10名程度を識別できる。など
- ▌ネットワークとの結合
- 移動体抽出やポスチャ・ジェスチャ認識など、認識技術によるコミュニケーションの進化を実現しています。
-
▌ユーザーが持つネットワークシステムとの結合
・顧客情報をベースとした適切な応対やサービスが可能。
・個人端末へ来訪の通知を行う受付案内。顔画像の転送も可能。
・予約された所定の場所へお客さまを誘導する。など
-
▌インターネットとの接続
音声による指示で、ニュースや天気をたずねると、インターネットより情報を入手し、答えることが可能。 など
移動体抽出(1)
移動体抽出(2)
ジェスチャ認識
ポスチャ認識
環境認識(2)
環境認識(1)
顔認識
音源認識