| 運転負荷・被害軽減研究[ホンダASV-2(1号車)] |
| ドライバーの運転負荷を軽減し、疲労による認知・判断能力の低下を抑制。“うっかり、ぼんやり”が原因の追突事故などの予知・予防をめざした研究です。
|
| 【運転負荷・被害軽減研究概念図】 |
 |
| CCDカメラによる白線の検知とミリ波レーダーによる車間距離・相対速度の把握により、車線維持と車間距離の制御でドライバーの負担を軽減。事前の警報により事故発生の抑制もめざします。 |
|
|
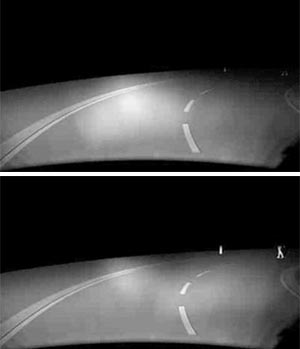
[1] 車線維持制御と車線逸脱警報
CCD カメラで捉えた道路から画像処理によって白線を検知。高速道路の走行レーンを維持するようにドライバーのステアリング操作を電動パワーステアリングにより支援します。車線から逸脱する可能性がある場合は、警報音を発してドライバーに注意を促します。

|
車線維持と車線逸脱警報の技術については、HIDS(HONDA Intelligent Driver Support System )として運輸大臣の認定を受け現在商品化をめざし、公道においてテストを行っております。
|
[2] 車速/車間制御と渋滞追従制御
同一レーン上の先行車を検知し、スロットル制御および必要に応じたブレーキ制御を行い車間距離を一定に保ちます。交通渋滞の場合には先行車に追従して停止までを制御します。
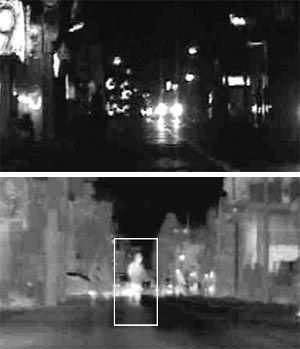
[3] 追突速度低減システム
先行車との車間距離が短くなった場合、まず警報音でドライバーに注意を促します。それでもドライバーが対応せず危険な車間距離になると、警報音と軽い自動ブレーキでドライバーに回避を促します。さらに追突を避けるのが困難と判断した場合には、ドライバーのブレーキ操作を支援する緊急ブレーキで追突による被害の軽減をめざします。
|