|
4WSのすぐれた運動性能をさらに引き出し、
人の感覚によりリニアに応答するハイパー4WS。
4WSの可能性を追求し、より高度な制御を実現。
あらゆる状況への対応をめざした電子制御電動式4輪操舵システム・ハイパー4WS。
4WSの基本は、後輪を、前輪と同時に転舵することで積極的に横すべり角を与えて、コーナリング・フォースを引き出すことにあります。2WSに比べて、旋回時における車体全体の横すべりをおさえ、前後輪の発生するコーナリング・フォースをバランスよく制御。横Gの位相遅れやヨーイングの少ないすぐれたハンドリング特性を実現します。
つまり、後輪に舵角を与えることで、横力の素早い発生、車体横すべり角の少ないコーナリング、ヨーイング・モーメントの減少、旋回性能・高速安定性の向上など、より高い領域での性能向上が可能となります。ホンダが目標とした性能向上のポイントは、より高度なハンドリングと高度なスタビリティ、そしてドライバーの感性へのフィッティングです。開発にあたっては、「シーン別制御の個別プログラム化」を鍵に、あらゆる状況に応じた舵角セッティングを可能とする4WSの実現をめざしました。
車速制御・舵角制御・舵角速度制御。
それぞれの制御が連動し、最適の舵角特性を決定。
4WSの持つ可能性を最大限に引き出し、新しい運動性能の領域を具現化するために、ホンダは、これまで研究を重ねてきた制御技術を惜しみなく投入。車速・舵角・舵角速度応動型4WSを開発しました。これは、「舵角制御」に「車速制御」とドライバーがハンドル操作する速さに応じた「舵角速度制御」を加え、常にこの3つを情報パラメーターとして、ドライバーの意思と走行状況に適した運動特性を判断し、後輪舵角を決定。ハイパー4WSは、あらゆる状況での操縦安定性と、低速域での取り回し性の飛躍的な向上。さらに、人間の感覚に限りなく近い操舵特性の実現をめざし開発したものです。 |
|
|
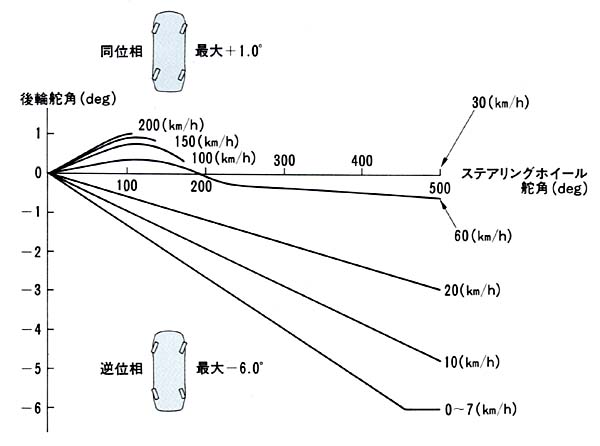
■ハイパー4WSの後輪操舵プログラム。
車速・舵角・舵角速度、の3つのパラメーターをもとにした各制御を行ないます。刻々と変化する状況に応じ、最適の後輪舵角を決定します。
●車速制御
車速に応じて最適の特性に変化させます。
低速:取り回し性の向上
中速:ハンドリング性能の向上
高速:高速直進性と安定性の向上
●舵角制御
(中〜高速走行)
ステアリング操舵角に応じて最適の特性に変化させます。
ステアリング操舵角・小:操縦安定性の向上
ステアリング操舵角・大:アンダーステアの減少
●舵角速度制御
(中〜高速走行)
ステアリング操作が速い場合に舵角補正を行います。
速いステアリング操作:回頭性の向上
遅いステアリング操作:操縦安定性の向上
|
ECUの電気信号だけで、ダイレクトに駆動する電子制御電動式の操舵システム。
■ハイパー4WSの構成
ハイパー4WSシステムの基本となるのは、7つのセンサーと専用のECU(電子制御ユニット)、それに後輪を操舵するリアステアリング・アクチュエーターで構成されています。
車速、舵角、舵角速度、そして後輪舵角のすべての信号は、高い信頼性を誇る専用ECU内の16ビットのメインCPU(中央演算装置)とサブCPUによって高速演算が行われます。また、すべての状況でECUが電気信号によってダイレクトにリアステアリング・アクチュエーターを駆動します。
|
■ハイパー4WSの作動原理
 |
作動原理
(1)センサーより舵角と車速を計測
(2)ECU内にて舵角変化から舵角速度を算出
(3)舵角、舵角速度、車速より目標舵角を演算
(4)センサーにて後輪舵角を測定
(5)ECU内パワー系にてモーター駆動
(6)目標舵角と後輪舵角が一致した位置で保持 |
|
|
|