ASIMOを通じて
学んだこと
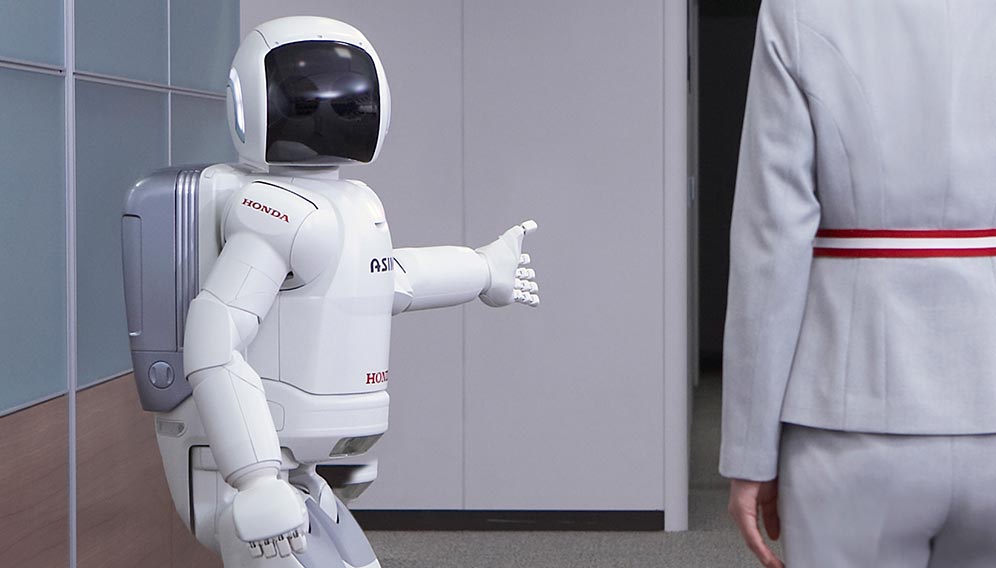
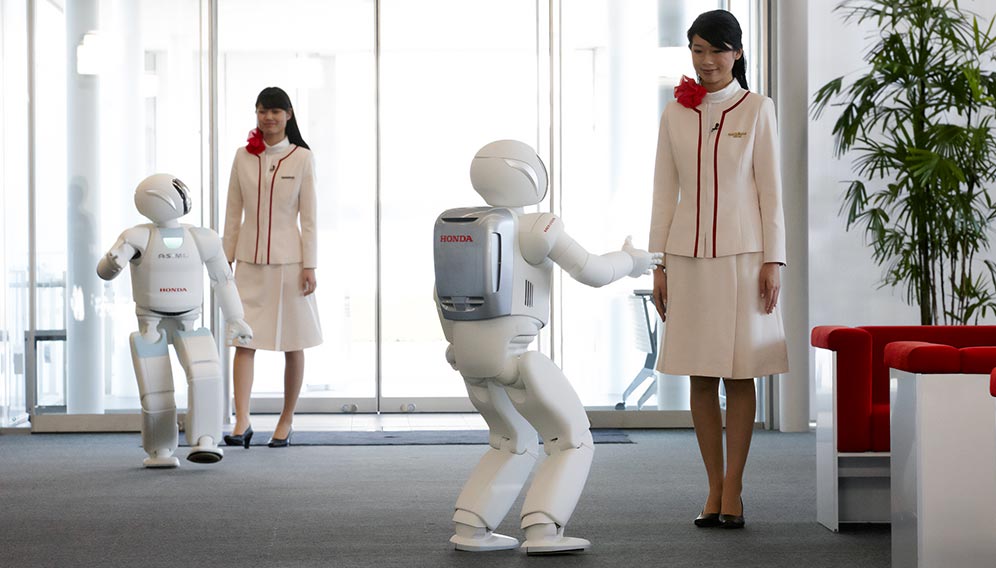
“ロボットのいる生活”を
提示したASIMO
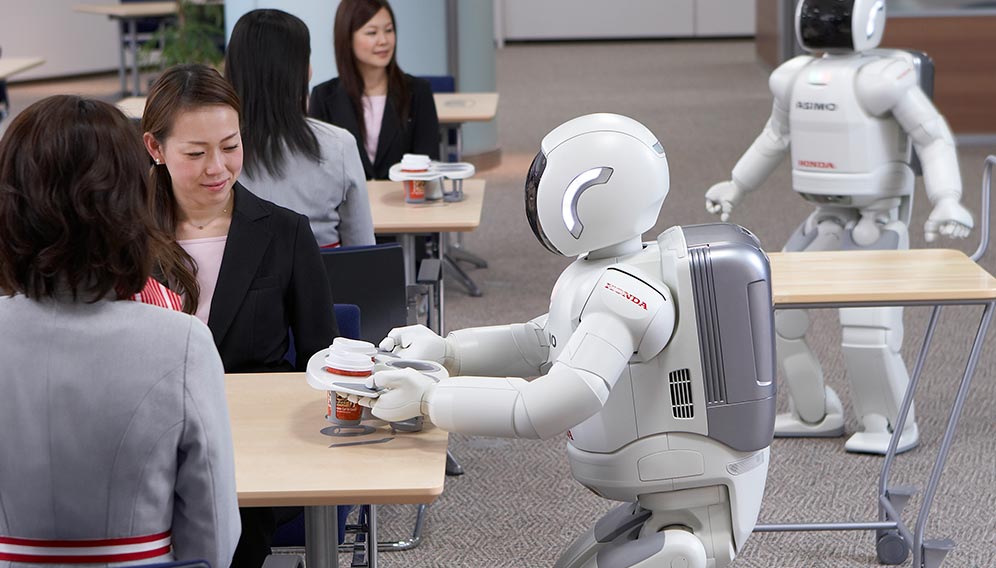
ASIMOの開発を通して、人の生活空間で活動するために求められる運動能力実現の見通しが立ち、人の機能を工学的に再現することができるようになりました。
特に、人とすれ違ったり、ぶつかっても倒れないなどの「人と同じ空間で移動する」機能、「手を使って作業する」機能、人の発話内容を理解したり、人の意図をくみ取って動きを制御するなどの「人とのインタラクション」機能を実現することができました。そして、人の生活空間で活動するASIMOを見ていただくことにより、たくさんの人にロボットのいる未来を想い描き、想像の翼を広げていただけたのではないでしょうか。
総歩数3,326万歩から
わかった課題
ASIMOは誕生から20年以上、日々デモンストレーションを行ってきました。すべてのASIMOがこれまでに歩いた歩数を合計すると3,326万歩以上、総歩行距離は7,907kmにのぼります。こうして積み重ねた実績からさまざまなことがわかりました。
Hondaは、人の生活空間の中でロボットを活動させるために安全を担保する取り組み、人とぶつかった際に衝撃をいなす技術の開発も行ってきました。それでも「万が一ロボットが転倒した場所に子どもがいたとしたら?」。現実の生活空間にロボットを存在させるためには、多くのことを想定し、さらに安全を意識しなければならないことが研究を通してわかりました。
完全自律型の
2足歩行ロボットの実現には
長期的な研究や法整備も必要
生活空間の複雑さをロボット自身で理解・判断して行動する自律化に大きな課題があることにもあらためて気づきました。2足歩行の人間型ロボットを25年以上にわたって研究開発してきた結果、人の生活空間で活動でき、なおかつ転倒時の安全に配慮した完全自律型の2足歩行ロボットを実現するには、今後ある程度長期にわたる研究開発だけでなく、ロボットとともに生活する社会的なコンセンサスや法整備なども必要だとわかりました。このようにHondaは、人の生活する環境の中でロボットが動き続けるためにはどうすれば良いかを考え続け、ASIMOを通してノウハウを得て、次なる一歩へとつなげたのです。

2足歩行以外の移動方法も研究
完全自律型の2足歩行ロボットの実現には長期的な研究が必要なことがわかったため、別の移動方法の研究もしてきました。例えば成田空港で実証を行っていたガイドロボットは、ボールや車輪で移動しており、万が一子どもとぶつかった場合の衝突試験も行っています。



- Honda Robotics
- ASIMOを通して学んだこと
- 新価値関連コンテンツ