
次世代ASIMOの技術発表
Honda和光ビル
2004年12月15日(水)
Honda和光ビル
2004年12月15日(水)
- 人間と共存・協調できる新たなモビリティーを目指し、すばやく状況を判断して、機敏に行動することを可能とする次世代ASIMOの技術が発表されました。
それでは、発表の様子をご紹介していきましょう。
- ▌次世代ASIMO技術発表会
-
大勢の報道陣が集まった中、次世代ASIMOの新しい技術についての説明が行われました。
「人間と共存・協調」できる新たなモビリティーを目指して研究、開発中のASIMO。 今回の発表では、よりスピーディーな動きが可能になった得意の2足歩行技術をはじめ、障害物があれば自分で判断して迂回して目的地まで行けたり、相手の動きに合せて握手ができたりといった実環境の活用の中から得たノウハウをフィードバックし実用化に近づけた技術などを披露しました。 まず、従来の時速1.6kmから時速2.5kmにスピードアップした2足歩行技術をみせると驚きの声があがりいました。
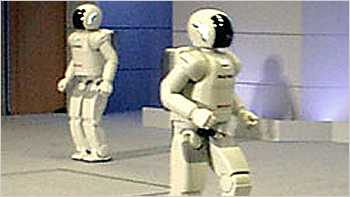
続いて目的地のルートに障害物があった場合でも自分で判断して別のルートを歩いたり、相手の動きに合せた握手や、手を押し引きされた方向への足の踏み出すデモンストレーションなどを披露しました。
そして、何よりも会場を沸かせたのが「走るASIMOのデモンストレーション」です。会場全体が注目する中、ASIMOは全身をリズミカルに上下させ走りだしました。その走る姿に、会場から集まった多くの人たちから驚きの声が上がりました。
走りを実現するには、正確な飛躍と着地した時の衝撃の吸収と、高速化にともなうスピン・スリップの防止という二つの課題がありましたが、新しい姿勢を制御する技術などで、人に近い本格的な走りを達成しました。
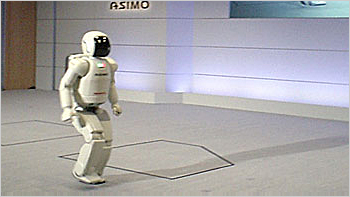
↑次世代ASIMOの技術発表

↑大勢の報道陣が詰め掛けました

↑押し引きされた方向に歩きます
↑時速3kmで走ります
- ▌スピーディな動き(45秒)
人に遅れない歩行速度
腰の回転軸を追加した事で、足を高速に振った時に発生するスピン をキャンセルすることができ、自然で滑らかな動作が可能となりました。 その結果、人に遅れない歩行速度を実現させる事が出来ました。
- ▌自律連続移動(44秒)
周囲状況を把握して自らの判断で移動
新たに追加した床面と視覚センサから得られた情報と、既にインプットされている地図情報を照合し、目的地まで立ち止まることなく移動する事が可能となりました。
- ▌人に合わせる動き(37秒)
相手に同調し自然に接することができる
新たに手首に追加された力覚センサにより、相手に合わせた握手や、握手の際に手を押し引きされた場合に同じ方向への足の踏み出すなど、 相手の動きに同調した動作が出来るようになりました。
- ▌走りの実現(17秒)
人に近い本格的な走り
高速化に伴う足のスリップや空中のスピンを防止するために上半身の曲げやひねりを用いる事により時速3kmでの走行を実現しました。走行時の跳躍時間は0.05秒です。