
機敏な行動が可能に
- 人間と共存、協調できる新たなモビリティーを目指して、実環境のなかで、すばやく状況を判断して、機敏に行動することを可能とする次世代ASIMOの技術を発表しました。
- ▌人に近い本格的な走り(3.0km/h)
- 高速化に伴う足のスリップや空中でのスピンを防止するために、新開発の高応答ハードウェアと共に、上半身の曲げやひねりを用いることにより時速3Kmでの人に近い走行を実現しました。(新姿勢制御技術) この「走り」の技術は、「つまづいた」ときにサッと脚が出てバランスをとることができるなど、二足歩行ロボットの機能を大幅に向上させることにもつながります。
- ▌高応答ハードウエア
[ポイント]
着地時に発生する衝撃力
:遅れのない正確な飛翔と着地時に発生する瞬間的な衝撃力の吸収
ロボットにおいて走りを実現するためには、足の蹴り・振り出し・着地動作を、極めて短い周期で遅れなく繰り返すとともに、着地時に発生する瞬間的な衝撃を吸収する必要がありました。
[しくみ]
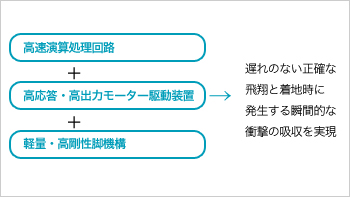
- Hondaは、新開発の高速演算処理回路、高応答・高出力モーター駆動装置、軽量・高剛性の脚機構によって、従来比4倍以上の高精度・高応答なハードウエアを完成させました。
- ▌新姿勢制御理論
[ポイント]
難床・着地時のスピン・スリップ
:前方へジャンプするために発生するスピン・スリップを防ぎつつバランスをとる
足が地面を離れる直前と足が地面に着いた直後は、足底と地面との間の圧力が低いためスリップやスピンが生じやすく、これにより走行時には姿勢が不安定になるという問題があり、これを克服することが、走りのスピードアップにおける制御上の最大の課題でした。
[しくみ]
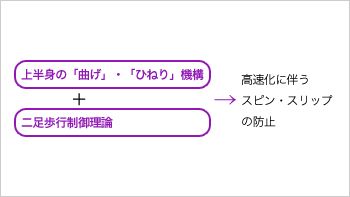
- Hondaは、独自の二足歩行制御理論に加え、新たに上半身の曲げやひねりを積極的に用いることで、滑りを防止しながら、安定した走りを実現する新しい制御理論を開発しました。
- ▌走行時の荷重波形と高速度撮影画像